Jie Liu 刘杰I'm a PhD student at School of Mechanical and Electric Engineering of Soochow University advised by Prof. WenZheng Chi and Prof. Lining Sun. |

|
PublicationsMy research interests include robotic path pathing, robotic learning, and Embodied AI. † denotes equal contribution, * denotes corresponding author(s) |
|
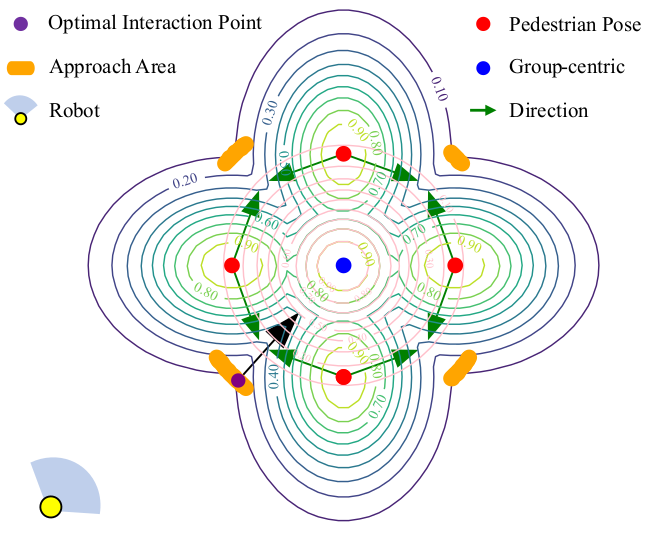
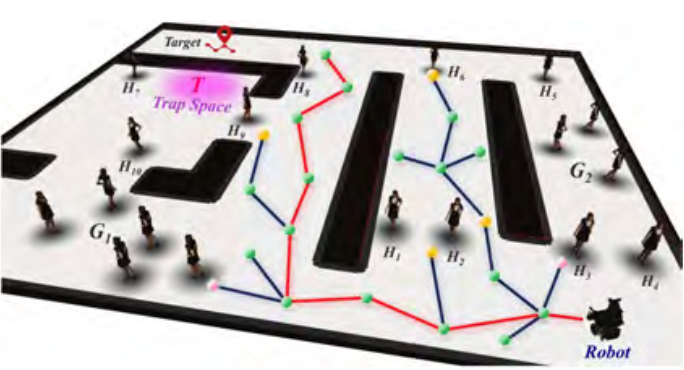
Human-robot collaborative navigation: An interactive information entropy minimization framework for mobile social robotsJie Liu†, Xujun Xu†, Zhiyu Ding, Jiajie Yu, Shiyu Miao, Wenzheng Chi*, Lining Sun* Biomimetic Intelligence and Robotics, 2026 arxiv / This study introduces a novel human–robot collaborative navigation framework on the basis of the interactive information entropy, which is proposed to quantify information about pedestrian groups, assesses the capacity of robots to acquire group-related information from different positions, and offers a robust decision-making basis for identifying optimal interaction points. |
|
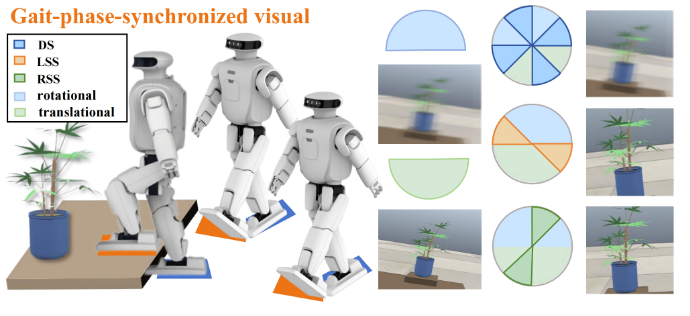
Bio-Inspired Gait-Adaptive Mapping: Real-Time 3D Scene Modeling Through Embodied Sensorimotor CoordinationShiyu Miao†, Jiajie Yu†, JJie Liu, Yao Wang, Chengfeng Sun*, Wenzheng Chi*, Lining Sun* IEEE Transactions on Automation Science and Engineering, 2026 arxiv / To address the challenges posed by periodic gait-induced disturbances in legged robotic systems, we propose an enhanced visual SLAM framework that systematically incorporates gait-phase awareness into the mapping optimization process. |
|
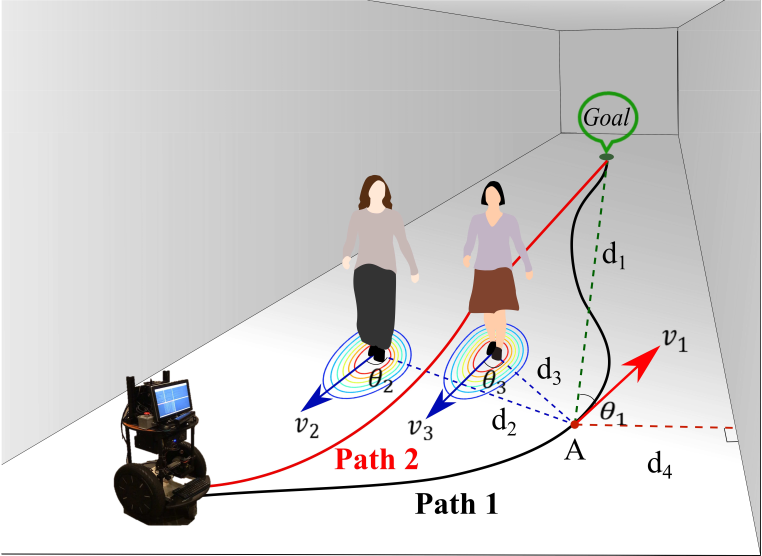
PRTIRL based socially adaptive path planning for mobile robotsZhiyu Ding†, Jie Liu†, Wenzheng Chi, Jiankun Wang, Guodong Chen, Lining Sun International Journal of Social Robotics, 2023 arxiv / We propose a nocel socially adaptive path planning framework for mobile robots incorporating a non-homotopic path penalty strategy with the Rapidly-exploring random Trees Inverse Reinforcement Learning (RTIRL) called PRTIRL. |
|
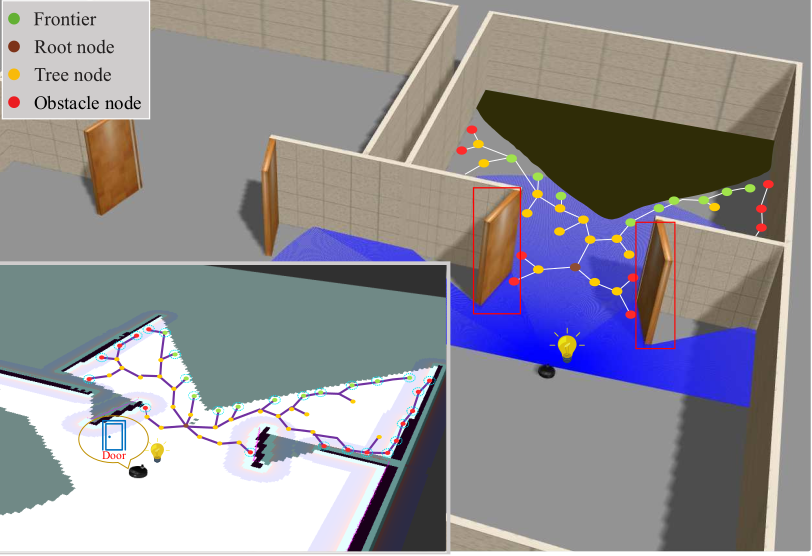
An efficient robot exploration method based on heuristics biased samplingJie Liu, Yong Lv, Yuan Yuan, Wenzheng Chi*, Guodong Chen, Lining Sun IEEE Transactions on Industrial Electronics, 2022 arxiv / video / We present a heuristics biased sampling-based robot exploration strategy, which utilizes the semantic information of the environment as the heuristics to guide the robot exploration. |
|
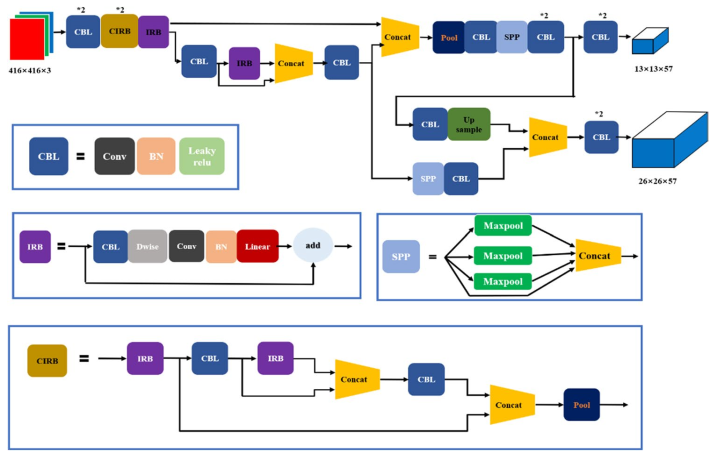
An Inverted Residual based Lightweight Network for Object Detection in Sweeping RobotsYong Lv, Jie Liu, Wenzheng Chi, Guodong Chen, Lining Sun Applied Intelligence, 2022 arxiv / We propose an accurate, fast, and lightweight You Only Look Once (YOLO) network for sweeping robots (SR). |
|
A Gaussian mixture model based fast motion planning method through online environmental feature learningYuan Yuan, Jie Liu, Wenzheng Chi*, Guodong Chen*, Lining Sun* IEEE Transactions on Industrial Electronics, 2022 arxiv / A fast path planning algorithm based on Gaussian mixture model (GMM) is proposed to allow robotic systems to efficiently extract feature nodes and generate collision-free paths considering the pedestrian density and the environmental structure. |
|
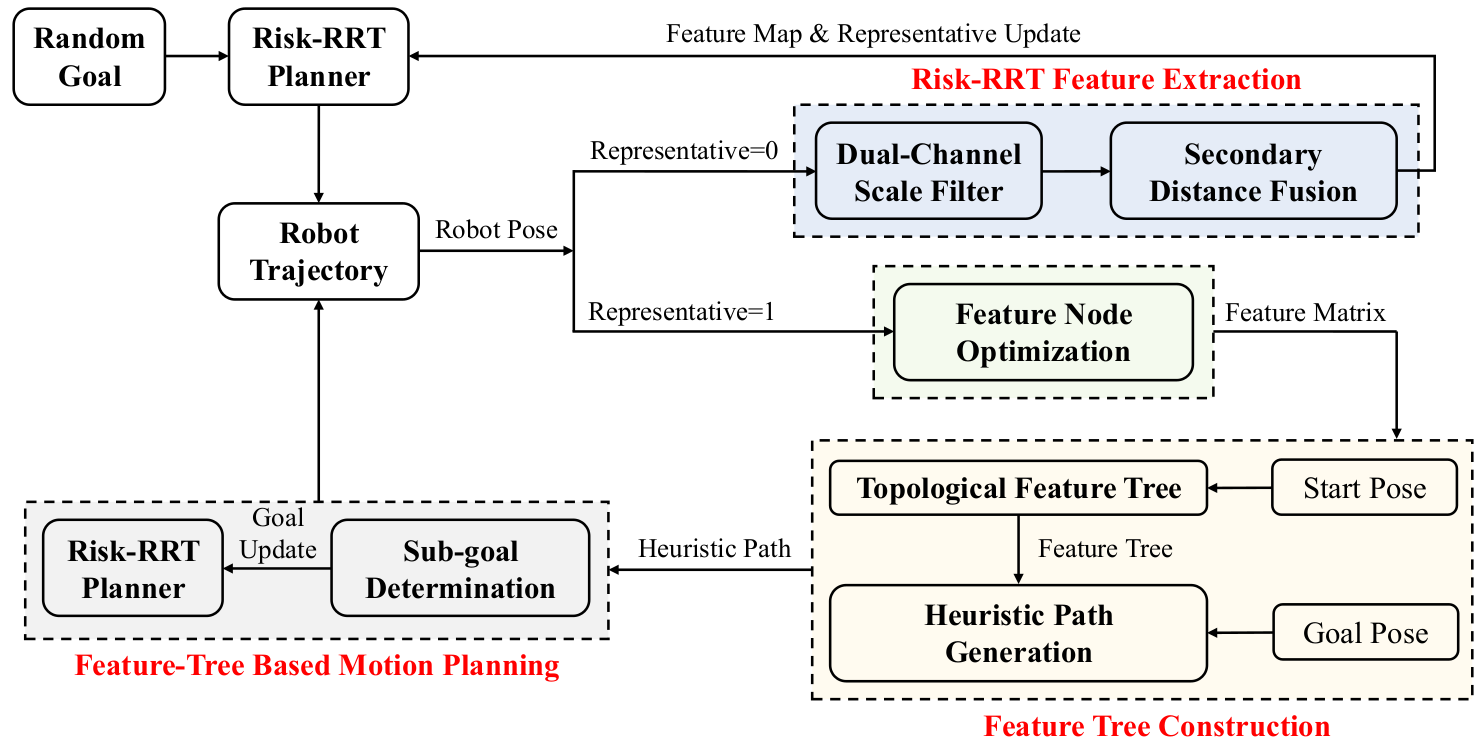
A knowledge-based fast motion planning method through online environmental feature learningYuan Yuan, Jie Liu, Jiankun Wang, Wenzheng Chi*, Guodong Chen*, Lining Sun* ICRA, 2021 arxiv / We present a knowledge-based fast motion planning algorithm based on Risk-RRT, which guides motion planning by constructing a topological feature tree and generating a heuristic path from the tree. |
|
Forked from Leonid Keselman's website |